搜题
答案
查看答案

搜题
相关试题
如下图所示,在机器人的手爪接触环境时,手爪力F与驱动力T1和T2的关系起重要作用,在静止状态下处理这种关系称为()。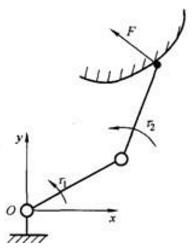
A、运动学
B、逆运动学
C、静力学
D、动力学
机器人在关节变量空间的轨迹或末端执行器在笛卡尔空间的轨迹已确定(轨迹已被规划),求解机器人各执行器的驱动力或力矩,这称为()。
A、正运动学
B、逆运动学
C、正动力学
D、逆动力学
[多选]物理学革命是指开创了()新领域。
A.光学
B.热力学
C.电磁学
D.运动学
A.光学
B.热力学
C.电磁学
D.运动学
定时插补的时间间隔下限的主要决定因素是( )。
A.完成一次正向运动学计算的时间
B.完成一次逆向运动学计算的时间
C.完成一次正向动力学计算的时间
D.完成一次逆向动力学计算的时间
A.完成一次正向运动学计算的时间
B.完成一次逆向运动学计算的时间
C.完成一次正向动力学计算的时间
D.完成一次逆向动力学计算的时间
[问答题简答题]人体运动的运动学量特征?