搜题
答案
查看答案

搜题
相关试题
关于2014版中的MassFX动力学模块中刚体的三种类型:动力学刚体、运动学刚体和静态刚体,下列说法错误的是()
A、动力学刚体的运动完全由模拟控制,它们会受重力和其他对象的撞击而发生运动
B、运动学刚体可使用标准方法设置动画,它们不可以是静止对象
C、运动学刚体可以影响模拟中的动力学刚体对象,但不会受动力学对象影响
D、在模拟过程中,运动学刚体对象可以随时切换为动态刚体
对一给定的机器人,已知杆件几何参数和关节角矢量求机器人末端执行器相对于参考坐标系的位置和姿态。这属于()。
A、机器人正运动学
B、机器人逆运动学
C、机器人静力学
D、机器人动力学
机械动力学的分析方法按功能分类可分为()
A、动力学反问题
B、动力学正问题
C、运动学正问题
D、运动学反问题
如下图所示,在机器人的手爪接触环境时,手爪力F与驱动力T1和T2的关系起重要作用,在静止状态下处理这种关系称为()。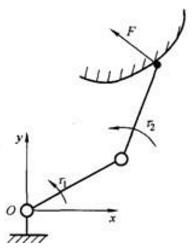
A、运动学
B、逆运动学
C、静力学
D、动力学
运动学中涉及的主要运动学量包括位移、速度和加速度。