搜题
题目
动态静力分析应用于()。
A、动力学正问题
B、运动学正问题
C、动力学反问题
D、运动学反问题
相关标签: 运动学 动力学
提示:未搜索到的试题可在搜索页快速提交,您可在会员中心"提交的题"快速查看答案。
答案
查看答案

搜题
相关试题
如下图所示,在机器人的手爪接触环境时,手爪力F与驱动力T1和T2的关系起重要作用,在静止状态下处理这种关系称为()。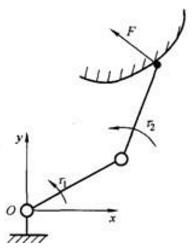
A、运动学
B、逆运动学
C、静力学
D、动力学
光场对于原子或分子运动状态的影响一直是人们关注的问题。由于光子具有动量,因此原子在吸收和发射光子的过程中,动量会发生改变,从而使原子或分子运动学行为发生变化。因为普通光源的光强很弱,它对于原子运动学行为的影响可以忽略,而激光场的光强很大,所以它对原子运动学行为的影响显著。在激光场中运动的原子运动的方向相反,那么辐射力将阻碍原子的运动并使其减速。分子速度的减小,意味着分子平均动能的减小,也就是物质温
A.分子平均动能决定分子速度
B.物体温度决定于分子平均动能
C.物体温度直接决定分子运动速度
D.分子速度受分子平均动能的牵制
定时插补的时间间隔下限的主要决定因素是( )。
A.完成一次正向运动学计算的时间
B.完成一次逆向运动学计算的时间
C.完成一次正向动力学计算的时间
D.完成一次逆向动力学计算的时间
A.完成一次正向运动学计算的时间
B.完成一次逆向运动学计算的时间
C.完成一次正向动力学计算的时间
D.完成一次逆向动力学计算的时间
机器人在关节变量空间的轨迹或末端执行器在笛卡尔空间的轨迹已确定(轨迹已被规划),求解机器人各执行器的驱动力或力矩,这称为()。
A、正运动学
B、逆运动学
C、正动力学
D、逆动力学
[多选]物理学革命是指开创了()新领域。
A.光学
B.热力学
C.电磁学
D.运动学
A.光学
B.热力学
C.电磁学
D.运动学