A.与凸轮角速度大小相等转向相反
B.与凸轮角速度大小相等转向相同
C.与凸轮角速度大小不等转向相反
D.与凸轮角速度大小不等转向相同
船舶在加速旋回阶段,船舶的旋回角加速度和旋回角速度的变化规律是()。
A、旋回角加速度由大变小,旋回角速度由小变大
B、旋回角加速度由小变大,旋回角速度由大变小
C、旋回角加速度由大变小,旋回角速度由大变小
D、旋回角加速度保持不变,旋回角速度由小变大
直航船操一定舵角后,其过渡阶段的()。
A、转向角速度为变量,角加速度为常量
B、转向角速度为常量,角加速度为变量
C、转向角速度为变量,角加速度为变量
D、转向角速度为常量,角加速度为常量
船舶在加速旋回阶段,下列叙述正确的是()。
B、旋回角加速度最大,旋回角速度为零
C、旋回角加速度和旋回角速度均为最大
D、旋回角加速度和旋回角速度均为最小
在某一瞬时,物体在力矩作用下,则有()。
A、角速度可以为零,角加速度也可以为零;
B、角速度不能为零,角加速度可以为零;
C、角速度可以为零,角加速度不能为零;
D、角速度与角加速度均不能为零。
A.轨道半径减小,角速度增大
B.轨道半径减小,角速度减小
C.轨道半径增大,角速度增大
D.轨道半径增大,角速度减小
当()时,刚体作加速转动。
A、店加速度为正值时
B、角速度为正值时
C、角加速度与角速度方向一致时
D、角加速度与角速度方向相反时
航向稳定性好的船舶,其螺旋试验结果表现为:()
A、舵角与角速度曲线出现多值对应的环形
B、舵角与角速度曲线呈单值对应关系
C、舵角与角速度曲线出现多值对应的环形,且环高较大
D、舵角与角速度曲线出现多值对应的环形,且环宽较大
转动运动中描述角量的物理量有:()
A、时间、位移、速度、加速度;
B、时间、位移、速度、角速度;
C、时间、位移、角速度、角加速度;
D、时间、角位移、角速度、角加速度。
稳态响应中横摆角速度增益达到最大值时的车速称为特征车速uch。证明:特征车速,且在特征车速时的横摆角速度增益,为具有相等轴距L中性转向汽车横摆角速度增益的一半。
航向稳定性好的船舶,其逆螺旋试验结果表现为:()
A、舵角与角速度曲线出现多值对应的S形曲线
C、舵角与角速度曲线出现多值对应的S形曲线,且曲率较大
D、舵角与角速度曲线出现多值对应的S形曲线,且高度较大
光驱采用的数据传输模式有()
A.CLV恒定线速度传输模式
B.CAV恒定角速度传输模式
C.只有CAV恒定角速度传输模式
D.PCAV区域恒定角速度传输模式
此题为多项选择题。
在人体的转动中,由公式V=ωR可知:()
A、线速度V与转动半径R成正比;
B、线速度V与角速度ω成正比;
C、角速度ω与转动半径R成反比;
D、当角速度ω不变时,线速度V与转动半径R成正比,转动半径R一定时,线速度V与角速度ω成正比。
稳态响应中横摆角速度增益达到最大值时的车速称为特征车速uch。证明:特征车速uch=1/K,且在特征车速时的横摆角速度增益,为具有相等轴距L中性转向汽车横摆角速度增益的一半。
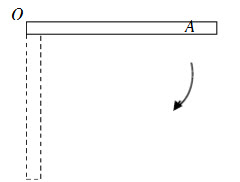
如图,均匀木棒OA可绕其端点O并与棒垂直的水平光滑轴转动。令棒从水平位置开始下落,在棒转到竖直位置的过程中,下列说法中正确的是:()。
A、角速度从小到大,角加速度从小到大
B、角速度从小到大,角加速度从大到小
C、角速度从大到小,角加速度从大到小
D、角速度从大到小,角加速度从小到大
 ,且在特征车速时的横摆角速度增益,为具有相等轴距L中性转向汽车横摆角速度增益的一半。
,且在特征车速时的横摆角速度增益,为具有相等轴距L中性转向汽车横摆角速度增益的一半。